Hello Guys! I wanted to ask if there is a way to perform the calibration without using a screen. Can I start/stop the calibration process and get if it is successful through zeromq message?
Hi 🙂 You can use the single marker calibration method in physical mode. Then you can print the markers on e.g. paper and show them to the subject in this way. After having the calibration selected in the UI, it can be started via the Network API as usual (sending the C command via Pupil Remote). There will also be a notification if the calibration failed or not.
Hi everybody! I am trying to collect data via the network API and I have a problem with the speed of request processing. It takes around 25ms to request and get surface data, but I would really need something below 16ms. Is there a way to do that? Thanks! I tested the speed with the following code:
subscriber = ctx.socket(zmq.SUB) subscriber.connect(f'tcp://{ip}:{sub_port}') subscriber.subscribe('surfaces.Surface1')
recording_time = 5 messages = [] message_time = [] t0 = time.time() while time.time() < t0 + recording_time: t1 = time.time() topic, payload = subscriber.recv_multipart() message = msgpack.loads(payload) t2 = time.time() messages.append(message) message_time.append(t2 - t1)
First it's quick but then it's gets slow

Hey, while doing this, could you please check the fps graph in the world window drops at the same time as the response time increases?
Hi @papr! Thanks for the answer. Indeed, the speed of the requests depend on the frame rate of the world view camera. Is there any way to get data without the limitation? So that if there are no updates of the gaze I just get the most recent update without wait for the next update to come?
Not sure if I understand. You are interested in surface-mapped gaze, correct? For that, you need two components: gaze and surface-locations. If one of them is not available, the surface gaze mapping will not work.
yes, I want surface-mapped gaze. If I request position of the gaze on the surface I get answer with the speed comparable to the frame rate of the world view camera, however, every message contains several "gazes" due to the higher frame rate of the eye-cameras. I'd like to get messages with rate comparable to the frame rate of the eye-cameras and not of the world-view camera.
I understand, but in order to surface-map the gaze, the surface needs to be detected first. And this can only happen at scene-camera sampling rate. Capture buffers gaze until the detection is done and afterward maps and publishes the gaze as a batch
okay, thank you!
An alternative solution would be to subscribe to surfaces and non-surface-mapped gaze and mapping the gaze yourself. You could use the last received surface definition instead of waiting for a new one.
This tutorial shows how to convert surface coordinates to scene coordinates https://github.com/pupil-labs/pupil-tutorials/blob/master/04_visualize_surface_positions_in_world_camera_pixel_space.ipynb You need to do the opposite but the logic is the same.
You would need the img_to_surf_trans matrix that is part of the surface datum to transform scene camera coordinates into surface coordinates.
great, that sounds good! Thanks again!
Hi, is it pls possible to get unprojected circle normal corrected for refraction using the current implementation? Like using Refractionizer before there is any pye3d model?
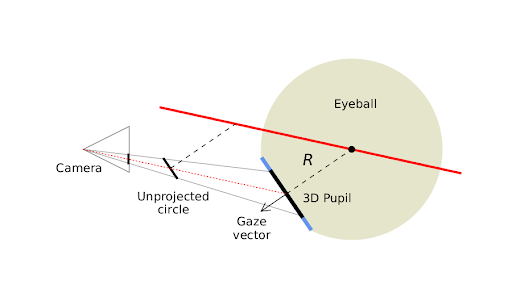
Yes, this is possible. All 3d fields in the pye3d pupil datum are corrected for refraction, including pupil_datum["circle_3d"]["normal"]. The projected values (e.g. pupil_datum["ellipse"] or pupil_datum["projected_sphere"]) are not corrected for refraction.
Thank you and are those corrections model independent? Like given different 3d model fit would the circle_3d normal be the same for the same image?
No, the correction is model dependent. The refractionizer basically performs a polynomial regression but uses the sphere.center, circle_3d.normal and circle_3d.radius as input.
thinking of it again I'm not sure how that would be possible I just somehow think that given the normal, camera ray and fixed eye radius there might be some refration model that would correct the normal
See this part of the source code for reference https://github.com/pupil-labs/pye3d-detector/blob/master/pye3d/eye_model/base.py#L267-L272
Thank you and do you have any idea if refraction correction is mostly affected by X,Y coordinates of sphere center? I.e. incorrect depth does not matter that much?
@kai do you know the answer to the above question?
@user-73b616 Yes, that is the case, gaze estimates are more sensitive to errors in the z-coordinate of the sphere center. A quantification of this effect can be found in Fig. 6A of the following publication: https://www.researchgate.net/publication/333490770_A_fast_approach_to_refraction-aware_eye-model_fitting_and_gaze_prediction
thank you both
@papr I've spent some time on the intrinsic matrix issue today. It's a bit premature to be completely confident in my results, but I thought I would share an early report. First, I've found a flip along both the azimuth and elevation. Second, I've found a compression. Again - these are preliminary results, and I need to dig some more. ...if you want to see the jupyter notebook that I used to create this figure, you're welcome to. I've just given you read access to a private repo, pupil-trial-analsis. The jupyter notebook projectionB.ipynb demonstrates my approach.
I would appreciate if you don't share the package without asking.
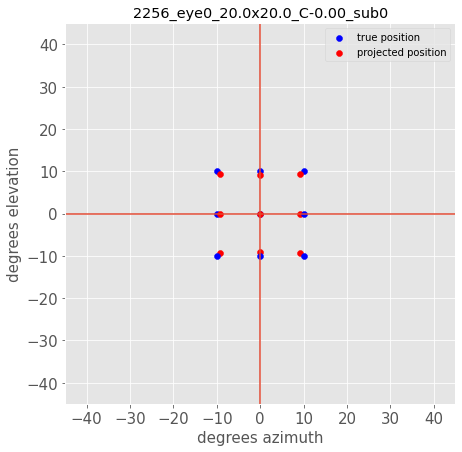
I can confirm the left / right flip.
Oh, sorry. let's move this to vr-ar.
Hello all, do you know of any online (real-time) fixation- duration/direction processing plugins/software/scripts/etc. used with either Invisible or Core?
There is a real-time fixation detector that you can run in Pupil Capture. Just enable it in the Plugin menu
Hi everyone, new in PupilLabs. As far as I know, you record videos with PupilCapture and then you import the recoding to pupilPlayer, and then export the results to obtain the raw data about pupil positions and pupil gaze. Currently, I am able to record videos with matlab, but I don't know how to export the data to get the acutal data, using Matlab. Does any of you tried to obtain data using Matlab? do you have any documentation that I can look at? thank you very much 🙂
Hi @user-e91538 👋. You can subscribe to gaze and pupil data in real-time. Have a look at the Matlab section of the Pupil Helpers repo: https://github.com/pupil-labs/pupil-helpers/tree/master/matlab, and specifically filter_messages.m
Hi @neil . Thank you so much for your response. I've been trying to get data on the pupil diameter and gaze, with the functions of that folder, and specifically with the one you mentioned, but I was not able. I am not able to get actual numbers. Do you know what could I try?
Hello, I have a data format question: In a pupil labs core record, what is the data format of world.intrinsics and eye1.intrinsics? How can I open that file in python? Thanks for any hints
@user-e91538
import msgpack
with open("world.intrinsics", "rb") as fp:
intrinsics = msgpack.unpack(fp)
Thank you very much! 🙂
It took longer than expected, but now I understand those functions! Thank you so much for the help 🙂
I have a different question. I want to track the gaze, and I guess the calibration procedure is needed. However, in my current setup I will not use a world camera. Is it possible to perform a calibration, without the world camera?
Technically yes, but you will need to provide calibration reference locations within a virtual and head-fixed coordinate system. E.g. in a VR headset, you can use Unity to display the markers in its main camera (user's point of view) and send the 3d locations to Capture. You would have to reimplement that functionality in Matlab.
I see...it might be more complicated than expected. And is there a way to load a dummy calibration? via Capture or via Matlab?
Could you maybe elaborate as why you don't need a scene camera? To what visual context do you want to relate the gaze signal to?
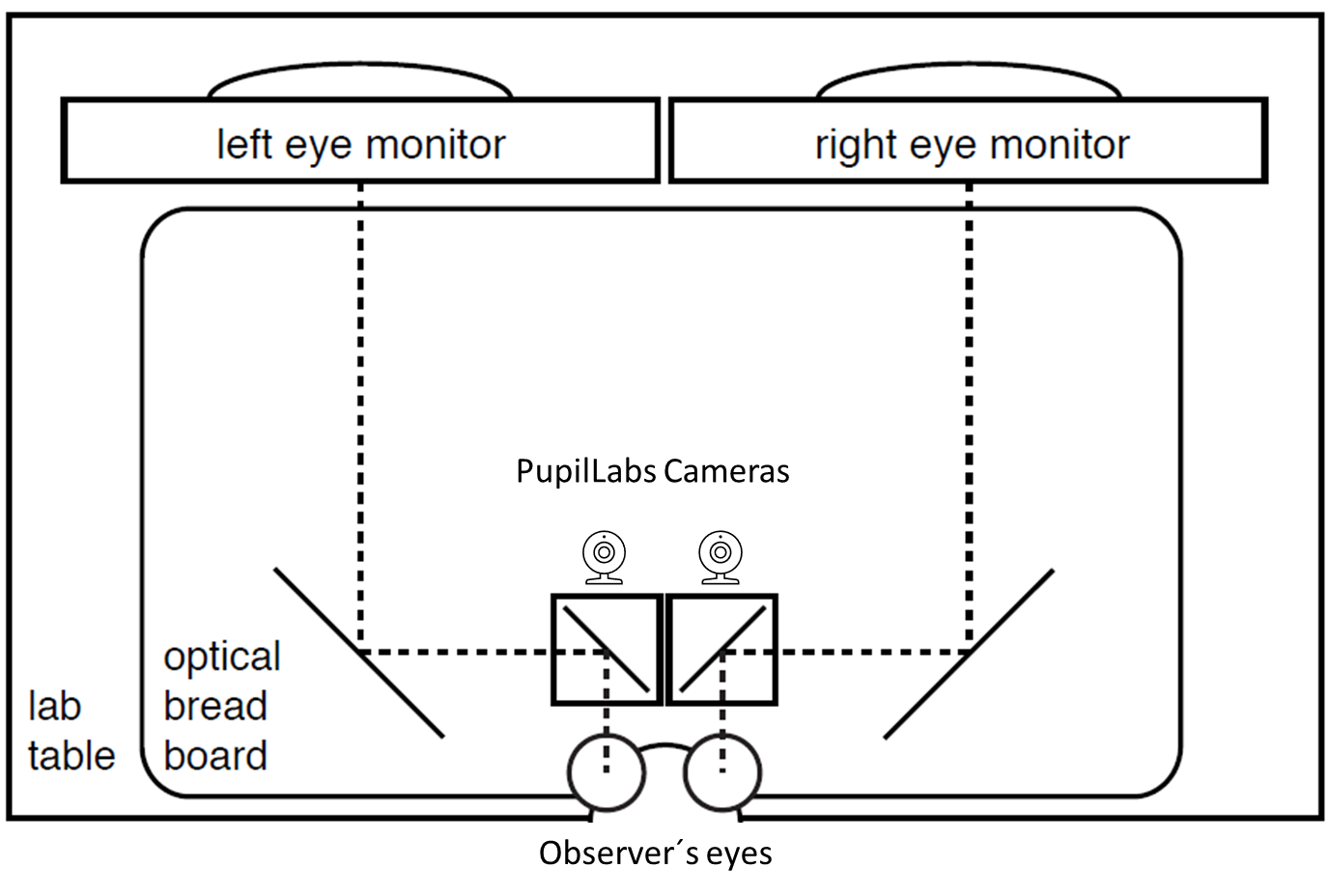
Yes, sure. We work with an haploscope system, what basically shows a different image to each eye to study depth perception, using two monitors and a set of mirrors. I´ve attached an image.
We want to measure gaze while performing some visual tasks of moving objects, placing PupilLabs cameras behind the first mirrors (which are hot mirrors, that allows IR light to go through)., one for each eye. That's why we don't need scene camera, because each eye will have a different scene (i.e. different monitor). The main issue now is that Pupil Labs needs a calibration to start collecting gaze data. Hope everything is clear enough.
Thanks !!
But in order to understand where the person is looking at, you need some kind of mapping between eye state and monitor location. Finding this mapping is what we call calibration. You can get the raw eye state in eye camera coordinates as "pupil" data. In your case, I would write a custom calibration plugin for Capture that collects reference data from the system that also drives the monitors.
actually i wanted to use pupil core world camera like a web cam. Basically i want to give that as my input to yolo.
so how can i take the real time time video stream as input ? any idea