Hey guys, I see that average eyeball size (sphere_radius ) has changed from 12 to 10.39230485. The documentation does not yet reflect this change. In pupil_gaze_postiions.txt: "sphere_radius - radius of the eyeball. This is always 12mm (the anthropomorphic avg.) We need to make this assumption because of the single camera scale ambiguity."
We are trying to render the pupil size accurately in our 3D blender model, so any input you can offer would be appreciated.
...for example, I remember there was a bug in which radius/diameter were confused. I'm not sure when this was addressed, and if it's something we should take into account.
@user-b14f98 @user-3cff0d For your information: https://github.com/pupil-labs/pye3d-detector/pull/36
hello, everyone, I want to get access to real-time data via network API, I follow the instruction on this link https://docs.pupil-labs.com/developer/core/network-api/#pupil-groups. But I the python demo did show any data. it's just led to infinite waiting. The code is like this: import zmq ctx = zmq.Context()
The REQ talks to Pupil remote and receives the session unique IPC SUB PORTpupil_remote = ctx.socket(zmq.REQ)
ip = 'localhost' # If you talk to a different machine use its IP. port = 50020 # The port defaults to 50020. Set in Pupil Capture GUI.
pupil_remote.connect(f'tcp://{ip}:{port}')
Request 'SUB_PORT' for reading datapupil_remote.send_string('SUB_PORT') sub_port = pupil_remote.recv_string()
Request 'PUB_PORT' for writing datapupil_remote.send_string('PUB_PORT') pub_port = pupil_remote.recv_string()
the subscription was successful, you will start receiving data.
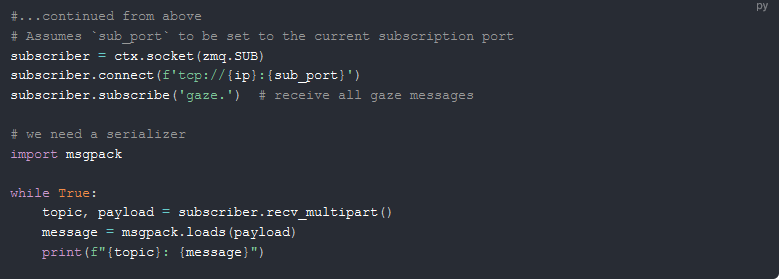
...continued from above Assumessub_port to be set to the current subscription port
subscriber = ctx.socket(zmq.SUB) subscriber.connect(f'tcp://{ip}:{sub_port}') subscriber.subscribe('gaze.') # receive all gaze messages
we need a serializerimport msgpack
while True: topic, payload = subscriber.recv_multipart() message = msgpack.loads(payload) print(f"{topic}: {message}")
then I set "topic, payload = subscriber.recv_multipart(flags=zmq.NOBLOCK)" , it reports" Traceback (most recent call last): File "getbackbonemessages.py", line 37, in <module> topic, payload = subscriber.recv_multipart(flags=zmq.NOBLOCK) File "D:\Users\splut\Anaconda3\envs\Furhat\lib\site-packages\zmq\sugar\socket.py", line 491, in recv_multipart parts = [self.recv(flags, copy=copy, track=track)] File "zmq\backend\cython\socket.pyx", line 791, in zmq.backend.cython.socket.Socket.recv File "zmq\backend\cython\socket.pyx", line 827, in zmq.backend.cython.socket.Socket.recv File "zmq\backend\cython\socket.pyx", line 191, in zmq.backend.cython.socket._recv_copy File "zmq\backend\cython\socket.pyx", line 186, in zmq.backend.cython.socket._recv_copy File "zmq\backend\cython\checkrc.pxd", line 20, in zmq.backend.cython.checkrc._check_rc zmq.error.Again: Resource temporarily unavailable " can anyone help on this??
Ah, please be aware that gaze is only available after a successful calibration. Try subscribing to pupil for testing the script
Could someone point me to the source code of the Marker detection for the surface tracker?
Apriltag or circle markers?
hey guys, is there any ways of using pupil with my own hardware instead of pupil core?
There is. The cameras either need to fulfill specific contraints (https://discord.com/channels/285728493612957698/285728493612957698/747343335135379498), use this third-party backend https://github.com/Lifestohack/pupil-video-backend, or you can write your own video backend.
Hey everyone! I am trying to get normalized gaze position (on defined surface with apriltags) via python.
subscriber = ctx.socket(zmq.SUB) subscriber.connect(f'tcp://{ip}:{sub_port}') subscriber.subscribe('surfaces.Surface1')
messages = [] start_time = time.time() while time.time() < start_time+5: topic, payload = subscriber.recv_multipart() message = msgpack.loads(payload) messages.append(message)
x = [] y = [] for message in messages: for j in range(len(message[b'gaze_on_surfaces'])): x.append(message[b'gaze_on_surfaces'][j][b'norm_pos'][0]) y.append(message[b'gaze_on_surfaces'][j][b'norm_pos'][1])
I defined the surface (Surface1) and performed all calibrations. Gaze mapping looks pretty good in GUI. I collected the data over 5 second while looking at the middle of the AOI and then averaged position data (x, y) in 25ms bins. I tried this for several times and every time it looks weird. After a short while the gaze position gets away from (0.5, 0.5), despite me looking at the the same point. I would very appreciate any help!!
Please filter low confidence data points:
for message in messages:
for gaze in message[b'gaze_on_surfaces']:
if gaze["confidence"] > 0.6:
x.append(gaze[b'norm_pos'][0])
y.append(gaze[b'norm_pos'][1])
Thanks! This is an important point. However, this was not the problem. I collected the data from wrong time points.
subscriber = ctx.socket(zmq.SUB) subscriber.connect(f'tcp://{ip}:{sub_port}') subscriber.subscribe('surfaces.Surface1')
After I subscribe the topic it buffers the data from the time point on. Later when I make requests it sends the most past data which it didn't send so far.
I've got one question according this sample. My code freezes when i call "subscriber.recv_multipart()". It is written, that i alsways have to "recv_string()" after sending a string. But do i also always have to send a string in order to receive a message back?
Any ideas why my code does freeze at hat location?
You need to differentiate between the socket types.
To interact with REQ ("request"), use send_string ("send request") and recv_string ("receive response") as pairs.
To interact with SUB ("subscription"), use recv_multipart(). So the code is correct.
One special thing is that you subscribe to gaze. Gaze is only available after calibration. For testing, you can subscribe to other topics that are available without calibration, e.g. pupil
Wow, perfekt! Its working now. Thank you so much!
Is there a code to reconstruct the eye positions from the data that was streamed through LSL?
If the data was recorded by latest LSL relay plugin and 3d pupil detection was turned on, then yes
Yes! Where can I find the code?
I mean the data is stored in the xdf file recorded by lsl. Checkout the LSL documentation on how to read the xdf files. Is there something else you want/need to know to achieve your goal?
The data is stored in XDF file! I’ll go through it! If I run into an issue I’ll get back to you!
I'm currently looking at data, gathered from using python and subscribing my socket to "pupil.". I am struggling to find out what all the label, like "theta", "phi", "location", ... stand for. Is there some kind of sheet where i can look up the definitions?
Check out the online documentation for descriptions of pupil and gaze data made available: https://docs.pupil-labs.com/core/software/pupil-player/#pupil-positions-csv
I've got a question regarding the data received when subscribing to "pupil". Does that data already depict the movement of the eye, or does it only tell how the eye is shaped and where it thinks the middle of the iris should be? In other words, would it be possible to write my own eye tracking with this data, or do I need the data that I get when I subscribe to "gaze"? Does "gaze" include the data that tells me what position I am looking at, or just alignment information about the eye?
What I'm getting at is actually whether this data, which I got by subscribing to "pupil", corresponds to the movement of the eye, or is just noise.
pupil data is eye movement data (to be exact: the current estimation of the eye position and direction) in eye camera coordinates. gaze is the estimated location where the subject is looking at in scene camera coordinates. To translate pupil to gaze you need a calibration function. That you can customize.
Perfekt. Thank you. That already helped me.
Hello All,
We are trying to communicate to pupil core from matlab. We can start and stop recording remotely using python scripts via matlab. to send annotations we incorporate excerpts of However, we are unable to send annotations using parts of function remote _annotation.py from matlab. We are using functions from resource https://github.com/pupil-labs/pupil-helpers/tree/master/python. It would be a great help if someone can share example scripts that can help us achieve this. We are new with python. Also we tried sending annotation using ZeroMQ but were unable to install that successfully in matlab (windows).
Hi @user-5d4724 👋 . Is there a reason why you can't use Python alone for these communications?
Yes , basically sir the experiment which we have designed requires the use of matlab along with python. That's why we are not using python alone.
Thanks for confirming. In that case, my suggestion would be to try to get ZeroMQ running with Matlab. I've not worked with calling Python functions from within Matlab and so can't offer assistance in that regard
Hi Guys, I have a question: we just brought Pupil Invisible. In our study, we want to capture the egocentric camera view from pupil invisible and three camera views from another three cameras (ZED camera). Before buying that product one of the pupil-lab representatives informed us that pupil-lab has a software application that helps to synchronously collect multiple camera views. I try to find that software but could not. Could you please share the link to the software application? Thanks.
Hi @user-5b0955 👋. We have indeed recently implemented open-source tooling that can be used to manually synchronise and display multiple videos (e.g. from a GoPro) alongside Pupil Invisible / Core recordings within Pupil Player. Further details to get this set up are below:
1) Script to generate Pupil-Player-compatible recordings from third party video files: https://gist.github.com/papr/bae0910a162edfd99d8ababaf09c643a - This can be run via python generate_pupil_player_recording.py <path to third-party video>. See the requirements.txt file at the bottom of the linked webpage for the dependencies - The script generates a folder based on the video file's name, moves the video to the new folder and generates all necessary files
2) Video overlay plugin for Pupil Player with manual temporal-alignment option: https://gist.github.com/papr/ad8298ccd1c955dfafb21c3cbce130c8 - See our docs on how to add the plugin to Pupil Player here: https://docs.pupil-labs.com/developer/core/plugin-api/#adding-a-plugin. If added successfully, you should be able to turn it on in the Plugin Manager menu - Once you have opened the Pupil Invisible / Core recording in Pupil Player, you can drag & drop the new third-party video file(s), now called 'world.mp4', onto the Player window - For each third-party video, an overlay should appear on the screen – you can adjust the temporal offset in the plugin's menu to manually align the videos so they are time-synced. Note: you would need an external event (e.g. hand clap, flash of light) with which to synchronize the videos - The 'World Video Exporter' Plugin will then export everything shown in Pupil Player (original recording + third-party video overlays)
Pupil Player can be downloaded from here: https://pupil-labs.com/products/core/ (scroll down to 'Download Desktop Software')